ASIA ELECTRONICS INDUSTRYYOUR WINDOW TO SMART MANUFACTURING
Kyocera Robotic Service Makes Intelligent Cobots
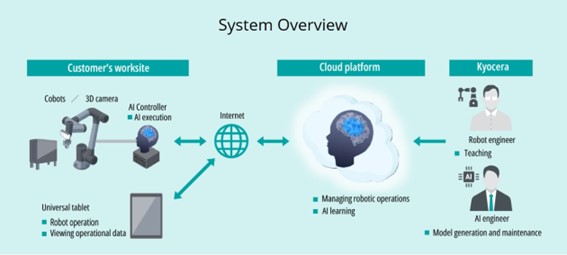
Kyocera Corporation has introduced Kyocera Robotic Services, a cloud-based service that makes intelligent collaborative robots (cobots) with artificial intelligence (AI) and 3D machine vision. This marks the company’s full-scale entry into the collaborative robot market.
Initially, the company started providing robotics services using collaborative robots from Taiwan company, Techman Robot, Inc. Successively, Kyocera plans to combine the robotics service with collaborative robots from other companies upon request. Also, users can avail of the cloud-based service through a subscription. So users can get optimal service based on the subscription type.
Kyocera Robotic Services uses a proprietary AI technology to significantly reduce the programming work or teaching. In the past, teaching was an issue when introducing collaborative robots. The company has combined AI and 3D vision to achieve intelligence in creating automated collaborative robots. These robots can also perform recognition of the situation of the surroundings, workpiece position, shape, and movement plan when moving the arm.
To maintain excellent autonomy all the time, the service is constantly connected to the cloud to monitor the status and behavior of the cobots and understand operational issues. In this case, it can deal with issues and make improvements at an early stage. Thus, safe and secure use of the cobots can be ensured. Since it is always connected to the cloud, even if the quality of object recognition by AI deteriorates, the quality can be maintained by relearning, thus continuous stable operation is possible.
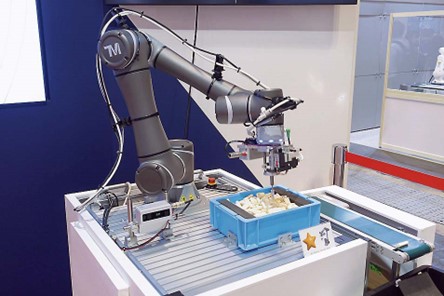
Specifically, the bin-picking service picks up a single workpiece from a mixture of various shapes. After detecting the workpiece, the robotic service determines the plane, the front and back, and the orientation. Next, it grasps the workpiece, separates the front and back, and aligns the orientation.

In transferring workpieces from tray to tray, there is no need to register additional items even when handling multiple rectangular workpieces. Also, the cobots can recognize and grasp the center of each workpiece with high accuracy. It recognizes and arranges the partitions of various trays in place.
- Share:





