ASIA ELECTRONICS INDUSTRYYOUR WINDOW TO SMART MANUFACTURING
Nikon Empowers Robotic Arms with New Robot Vision
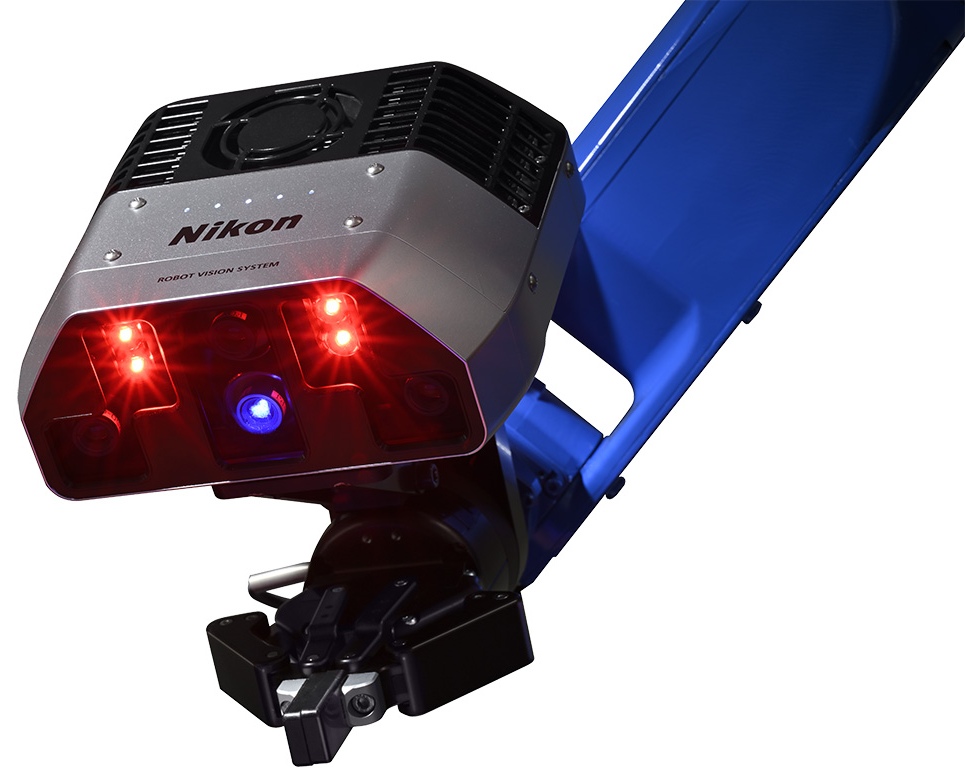
Nikon Corporation has announced it will release an industrial robot vision system in the fall of 2024. Specifically, the new robot vision system will come in NSP-150-1, NSP-250-1, and NSP-500-1 models. This vision system attaches to an industrial robot arm.
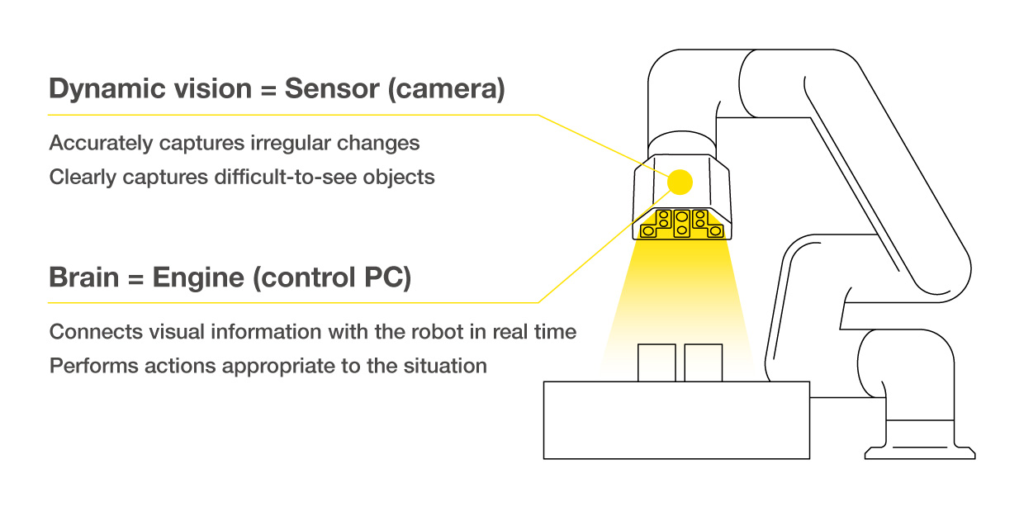
Also, this cutting-edge product features a sensor (camera), which senses conditions in the same way as a human eye, and an engine (control PC), which recognizes imaged objects by image processing and makes decisions concerning them. Thus, it adds dynamic vision and brain functions to the robot arm. Nikon’s robot vision system operates at high speed, has excellent recognition capabilities, and is easy to use due to its unique high-speed sensing technology. Accordingly, it contributes to reducing labor and improving productivity in many industries, including manufacturing.
Nikon will demonstrate this product at the Robot Technology Japan (at Aichi Sky Expo) exhibition from July 4 to 6.
Background of Development
Demand for multiproduct variable-volume production is increasing at production sites in various industries, including the automotive industry. More so, production, quality, and inventory management are becoming more complex. There are also social elements to consider, such as the increasingly serious labor shortage. Thus, there is a growing demand for automating simple tasks by utilizing a robot that can work quickly and accurately.
Due to this growing demand, many companies develop robot vision systems; however, there are various issues. For example, a lack of processing capacity may result in difficulty in recognizing certain parts. Also, operation/recognition may not match the required speed; the system may be difficult to use because of difficult and time-consuming pre-use settings; and introducing extra equipment may place a heavy burden on the system. Thus, there was a need to develop a robot vision system that can solve these problems.
Main Applications and Features
1. Bin Picking
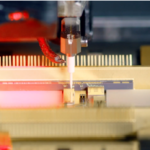
A unique, high-speed algorithm combining 2D and 3D cameras enables “bin picking”. This recognizes the position of and removes workpieces randomly stacked in a box. Since it enables route setting that avoids other workpieces, loosely stacked workpieces can be picked up without damaging them. Also, even if the target gripping position and the actual gripping position deviate, it is possible to reperform measurement after grabbing the workpiece to continue the operation while correcting the deviation.

Improving workpiece picking rate by reducing blind spots
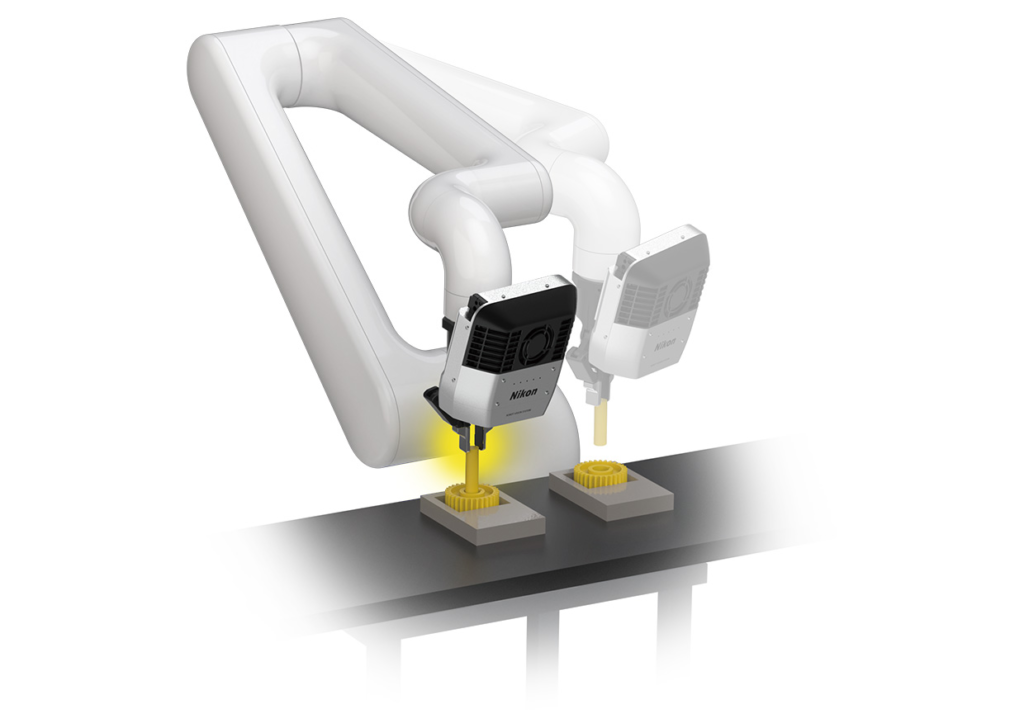
It takes advantage of the characteristics of hand-vision type sensor. Here, a camera attaches to the tip of the robot arm. Thus, recognition of workpieces with shapes, previously difficult to recognize, from directly above is possible by tilting the robot arm. Thus, when there is no recognizable workpiece within the field of view (FOV), the camera searches for workpieces from a different angle. Additionally, the system features a retry function. Here, if a workpiece is not found at the initial measurement position, the robot moves to an arbitrary position and measures from a different image capture position. Using these functions, the system can realize a workpiece picking rate of 100%*1.
*1With specific workpieces, in a test conducted in Nikon’s environment
Reduces takt time with high-speed operation at up to 250fps
Moreover, the system achieves high-speed measurement at up to 250fps in both 2D and 3D. To achieve this, it applies image processing technology that Nikon has cultivated through its camera development. Thus, it enables high-speed operation of robot arms that instantly assesses conditions and achieves a 2 second*2 operating time from measurement of the workpiece to movement of the robot arm.
*2In a test conducted in Nikon’s environment
Flexible relocation/expansion due to employment of hand vision
In existing fixed vision systems, equipment for affixing the camera needs to be incorporated. Accordingly, it restricts the layout of the production site, making it necessary to reassemble the equipment upon changes in processing.
For this product, which includes hand vision, there is no need to design complex equipment or purchase external equipment. It flexibly responds to the needs of relocation and expansion of production processes.
2. Vision Tracking
Recognition of workpieces running on transport equipment such as a conveyor, AGV, or AMR is possible by measurement at up to 250fps and high-speed robot arm control to achieve vision tracking. Particularly, it picks and assembles workpieces while smoothly tracking objects without stopping the transport equipment.
Also, because the system utilizes hand vision, the robot hands and workpieces can be sensed within a single FOV. Minor shakes and errors in gripping position generated in the moving workpiece and tip of the robot hand can be instantly corrected. This function can respond to sudden stoppages of transport equipment and workpieces whose orientation is likely to change during the production process.
No synchronization work and reduced setup time
With existing robot vision systems, it is necessary to prepare transport equipment that meets system specifications and programming to synchronize the movements of the transport equipment and the robot arm, making fine movement adjustment necessary. This leads to the problem of long lead times prior to start of operations. In addition, even after operation has begun, there are many cases where the robot arm cannot work properly due to slight wobbling or sudden movement of the transport equipment.
Since this system can track a workpiece as it sees it, it does not need to be synchronized with the transport equipment. Therefore, it reduces the time and effort for the setup.
Reduced capital investment cost
Existing robot vision systems have low image processing speeds, meaning movement of the robot arm cannot keep up with the speed of existing transport equipment. They are therefore sometimes supported manually, or operations are sometimes carried out offline*3, separately from the production line.
This system enables quick action with high-speed measurement at 250fps, and introduction of a robot vision system is possible utilizing existing transport equipment. There is no need for additional capital investment for offline work or securing space.
*3A method that is carried out by setting up a work process separately from the production line. It requires a method for moving workpieces between the production line and offline.
3. Software that Anyone Can Easily Use
Reduced teaching cost due to automation and simplification of various settings
Anyone can configure settings regardless of their skill level by automating some of the settings required, from adding a new workpiece to executing picking, such as grip position setting*4 and route setting*5, significantly shortening setup time, which is normally a long time. With this, adding workpieces can be realized in as little as 20 minutes*6.
*4Gripping position, method, target accuracy, and final action can be easily set with a simulation on the PC, simply by registering 3D models of the target workpiece and the hand.
*5A route that avoids interference with boxes and other workpieces can be automatically generated just by registering a CAD model of the surrounding environment.
*6With specific workpieces, in a test conducted in Nikon’s environment
Streamlining the management of multiple engines by utilizing data (optional, under development)
CAD data and operating parameters can be centrally managed on the server, and CAD data updates and parameter adjustments when switching workpieces can be made offline while the robot arm is operating.
It is also possible to carry out parameter adjustments and adjust result confirmation using error information, such as abnormal images and parameter data stored on the server. With this function, users can analyze the causes of errors and consider measures to prevent recurrence offline.
-09 May 2024-
- Share: