ASIA ELECTRONICS INDUSTRYYOUR WINDOW TO SMART MANUFACTURING
KDDI Demonstrates Single Management of Various Robots
KDDI Corporation has started trial demonstration of Robot Platform that unitarily manages robots on the cloud. In the trial demonstration, a single system manages robots for different applications or from different manufacturers. It verifies linkage functions with building facilities, which may become obstacles to the movement of robots in. Through the trial demonstration, KDDI aims to achieve smooth operation of robots.
Concentrated Control of Robots
Services wherein robots are used for delivery, cleaning, patrolling and other purposes have been expanding in recent years. At the current conditions, however, robots from different manufactures and for different applications need to be managed separately. In addition, there are cases in which building facilities, such as security gates and elevators, are becoming barriers to the movements of robots. Thus, there are many challenges that need to be addressed before their full-scale introduction.
In this demonstration, KDDI collaborates with KDDI Research, Inc. to achieve a mechanism for concentrated control of robots. It also aims to achieve efficient linkage with building facilities.
Trial Demonstration
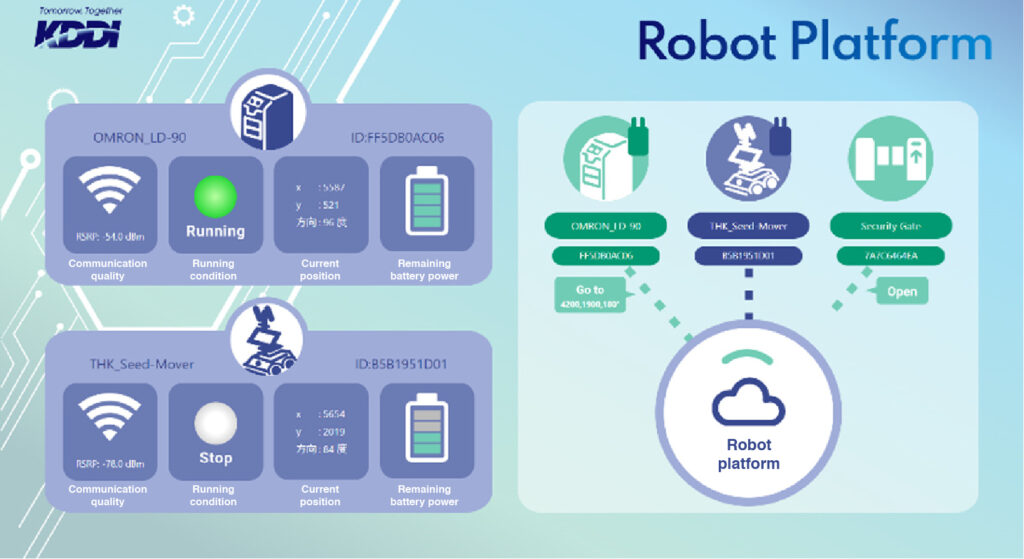
In the verification process, the companies have installed two robots of different varieties in KDDI research workshop, their research base in Minato-ku, Tokyo. They connected the robots to a security gate. The Robot Platform issues operation instructions to the robots. Then, the robots send information on their running conditions and current positions. Based on the information, the Robot Platform opens and closes the gate, and checks whether or not smooth passing is possible. The companies also plan to verify the linkage with an elevator by the end of this fiscal year.
Supports Management on Cloud
Robots connected to the security gate support the platform on the cloud and open-source robot development software, Robot Operating System (ROS), via mobile communication. Unified management on the same platform enables collision avoidance and interlinking operation of robots.
Going forward, the companies plan to integrate map, identification (ID) and settlement functions that can be commonly used to the platform. By doing so, they aim to reduce processing by the robots, leading to cost reduction of the robot main bodies. They also aim to provide stable services even when simultaneously controlling multiple robots or transmitting remotely monitored images through linkage with edge computing and fifth-generation (5G) high-speed communication.
- Share:





