ASIA ELECTRONICS INDUSTRYYOUR WINDOW TO SMART MANUFACTURING
New Yaskawa Tool Enables Customized Robot Communication
Facilitating ease of use, the YMConnect software development kit (SDK) from Yaskawa America, Inc. provides the ability to create customized PC applications that communicate with Yaskawa robots. The successor to MotoCom SDK, YMConnect uses a cross-platform library to control and monitor a robot over Ethernet. Thus, it allows for the integration of a custom PC application with the robot controller.
Software Features
YMConnect is available with a dynamic motion interface, thus can generate motion on-the-fly. Also, it easily facilitates kinematic conversions between pulse, joint angles and cartesian coordinates. Meanwhile, the GitHub repository helps to distribute the free dynamic library. A discussion board sends messages directly to software development experts, when needed.
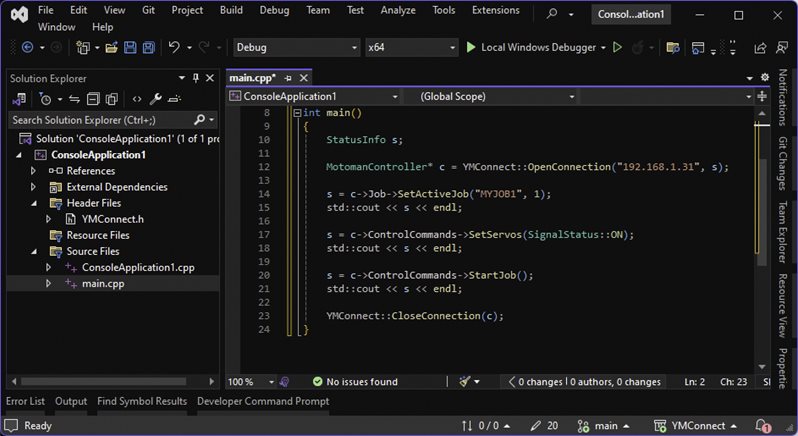
Exposed API provides intuitive function calls with straightforward error handling, and programming is achieved using modern C++ 17 language. Extremely user-friendly, YMConnect contains comprehensive code documentation for each function and example code for how to use those functions with an easy-to-use setup guide.
Additionally, it integrates common features that allow users to control how a robot interacts with its environment. Among them include reading the configuration of axes, monitoring feedback position and torque, monitoring the state of operations and errors, monitoring clear faults, and controlling and monitoring INFORM jobs. Also, it facilitates reading and writing controller variables (byte, integer, double, real, string and position), as well as reading unlimited I/O. Moreover, it can complete saving, loading and deleting files – with deletion supported only for JOB files.
Mainly, YMConnect is compatible with the YRC1000, YRC1000micro, FS100, DX200, and DX100 (DS2.07.00-00 and above) controllers. It requires Windows® 10 (or newer) or Ubuntu 22.04 (or newer) operating systems. Dynamic motion interface is only available on the YRC1000 controller and newer.
-14 May 2024-
- Share:





